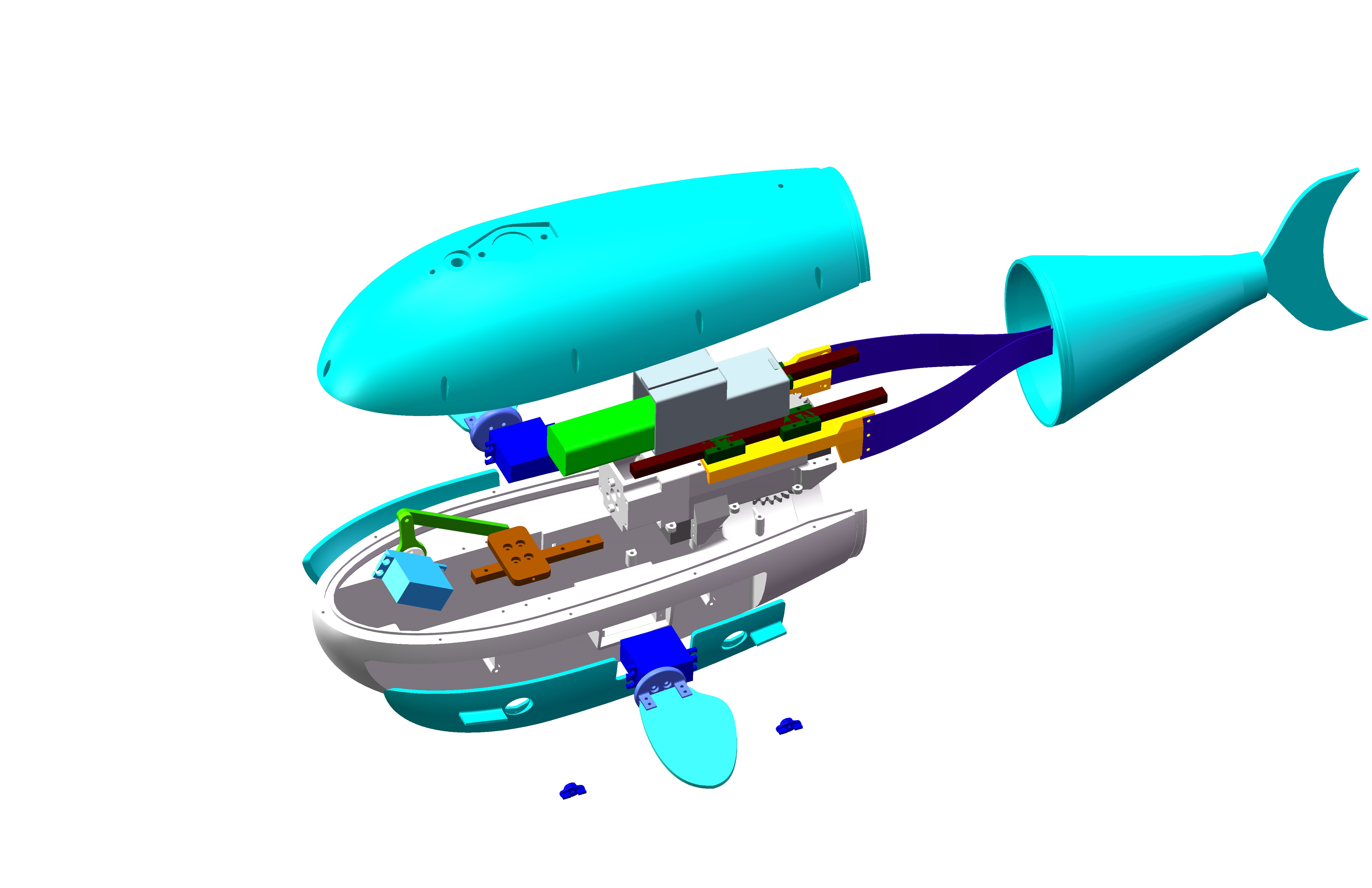
Developed an underwater fish robot able to swim, take turns and change speed;Designed a crank rocker mechanism with adjustable centerline for swimming & taking turns;Designed a compliant tail and modeled the dynamics using principle axis decomposition with MATLAB;First Prize & Good Creative Design Prize (Top 10 teams in China) @ National Undergraduate Mechanical Innovational Design Competition; Headline on SJTU homepage; Co-developed a generalized modeling software to fill the gaps in the Actinobacteria protein database by adding enzyme constraints to the genome-wide metabolic model of the Kcat values of model parameters;Modeled the reaction network in the language of matrix and optimized it by linear programming; Added enzyme constraints to the model and carried out FCC analysis to find key pathway; Used FBA to simulate the growth of Actinobacteria and production of Acarbose;Gold Prize @ International Genetically Engineered Machine Competition; Headline on SJTU homepage;