▶Robotics Projects
Game-theoretic AI Coaching XLAb, UPenn
2025.08–now
- Developing a game-theory based AI Coaching policy for robot racing;
- Trying a sim-to-sim policy migration from a gym to a simulator with physics and rendering;
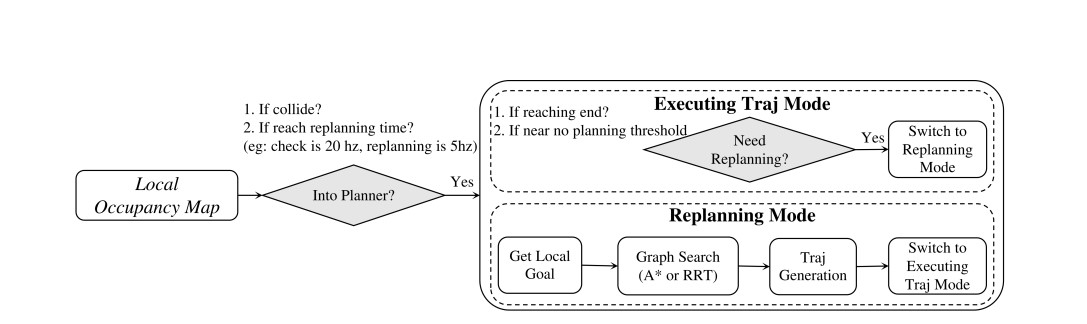
Simple VIO-based Navigation System for Autonomous Quadrotor MEAM 6200 Advanced Robotics Course Project, UPenn [code] [report] 2024.03–05
- Implemented Error State Kalman Filter to combine camera and IMU data together for local perception;
- Used Dijkstra and A* for local planning, Ramer–Douglas–Peucker and Min-Jerk for trajectory generation;
- Implemented a non-linear geometric PD controller for quadrotor control;
- Able to pass a narrow window with a tolerance of 0.6m and complete a 10m × 10m maze in 13 seconds.
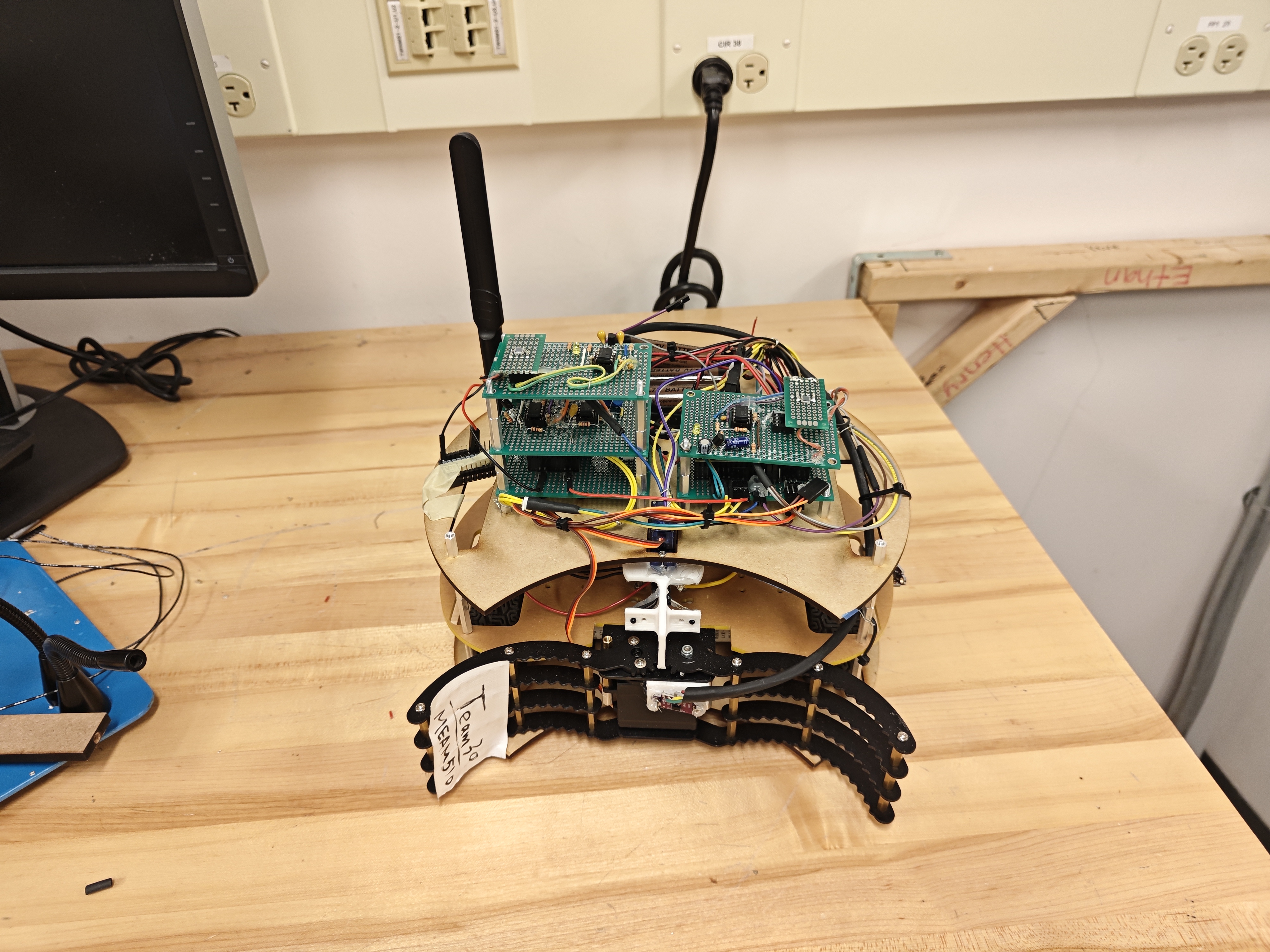
Grand-Theft-Autonomous MEAM 5100 Design of Mechatronic Systems Course Project, UPenn [code] [report] 2023.10–12
- Designed an autonomous mobile robot for beacon detection, navigation, gripping, and moving target objects;
- Used ToF sensor for collision-avoidance; Used IR-based beacon detection for self-navigation;
▶Computer Science Projects
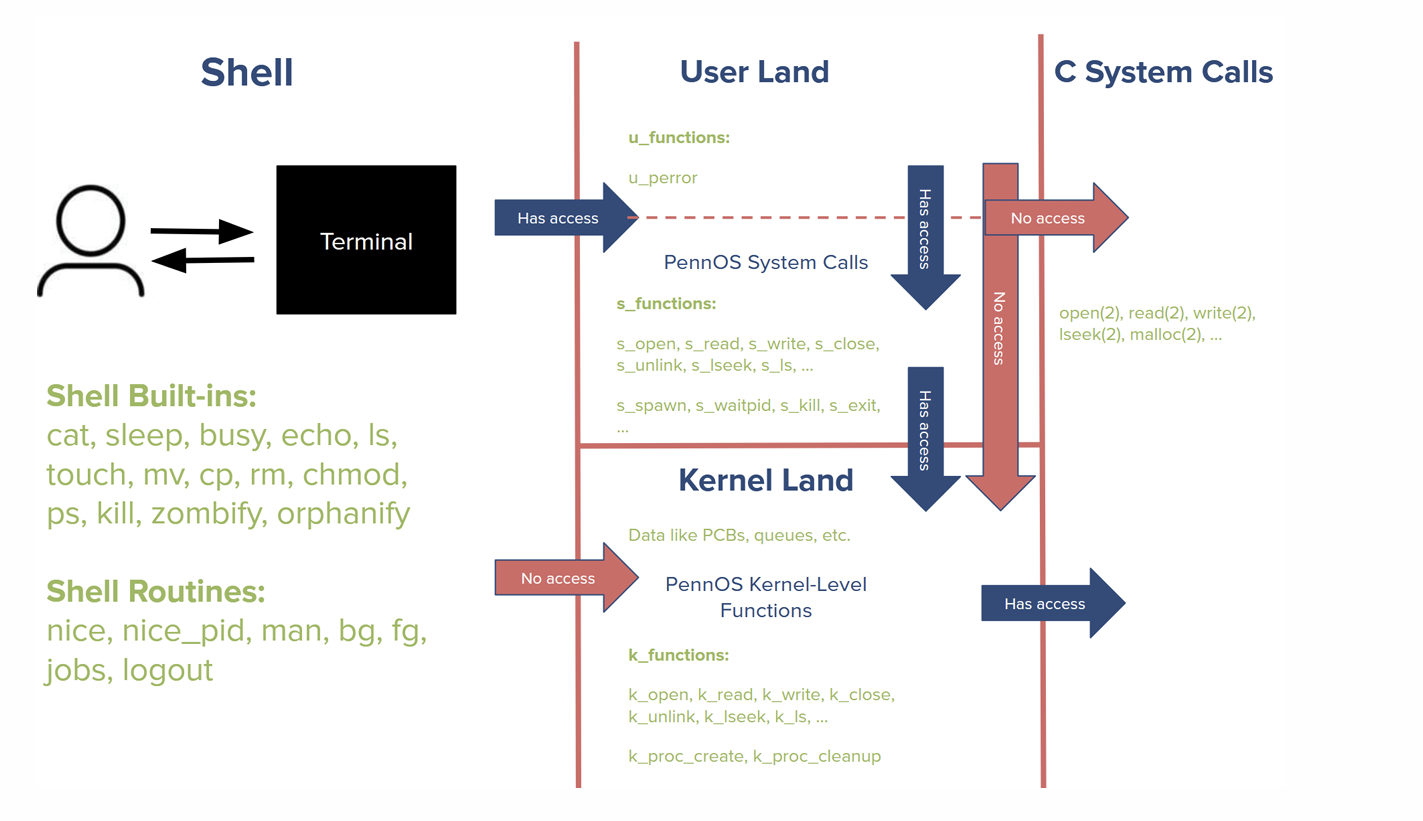
Penn Operation System CIS 5480 Operating Systems Design and Implementations Course Project, UPenn [code requested to be private] [manual] 2025.06–08
- Developed a distributed multi-process cloud platform supporting user authentication, mail and storage service;
- Implemented front-end HTTP server with load balancer and communication with big table;
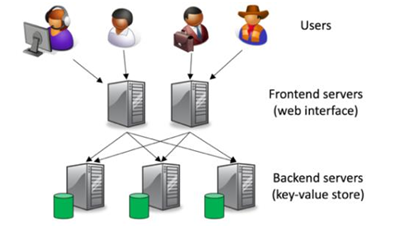
PennCloud Software System CIS 5050 Software Systems Course Project, UPenn [code requested to be private] [report] 2025.02–05
- Developed a distributed multi-process cloud platform supporting user authentication, mail and storage service;
- Implemented front-end HTTP server with load balancer and communication with big table;
▶Mechanical Design and Mechanics Projects
Natural Vibration Analysis for Aeroengine Blade with uncertain fastening Department of Engineering Mechanics, SJTU [report in Chinese] 2022.02–12
- Analyzed the natural vibration behavior of aero-engine blades with uncertain fastening;
- Developed Matlab code using the Rayleigh-Ritz method and finite element analysis separately for simulation;
A self-righting jumping robot with angle adjustment via flexible rods Design and Manufacturing Course Project, SJTU [report] [website] 2022.10–12
- Developed a self-righting jumping robot using flexible rods, reproducing this paper;
- Designed the robot's mechanical structure, making quasi-static analysis and experimental validation;